Robot Systems
Robots are machines that load and unload stock, assemble parts, transfer objects, or perform other tasks. They are used to accomplish many different functions such as material handling, assembly, arc welding, resistance welding, machine tool load/unload functions, painting/spraying, etc. According to OSHA, since 2000 most occupational accidents involving robots have been fatalities.

All industrial robots are either servo or non-servo controlled.
- Servo robots are controlled through the use of sensors which are employed to continually monitor the robot's axes for positional and velocity feedback information. This feedback information is compared on an on-going basis to pre-taught information which has been programmed and stored in the robot's memory.
- Non-servo robots do not have the feedback capability of monitoring the robot's axes and velocity and comparing with a pre-taught program. Their axes are controlled through a system of mechanical stops and limit switches to control the robot's movement.
Types of Robot Hazards
The use of robotics in the workplace can also pose potential mechanical and human hazards.
- Mechanical hazards might include workers colliding with equipment, being crushed, or trapped by equipment, or being injured by falling equipment components.
- Human errors can result in hazards both to personnel and equipment. Errors in programming, interfacing peripheral equipment, connecting input/output sensors, can all result in unpredicted movement or action by the robot which can result in personnel injury or equipment breakage. The greatest human error results from becoming so familiar with the robot's redundant motions that employees assume they know how the robot will move and place themselves in hazardous positions while programming or performing maintenance within the robot's work zone.
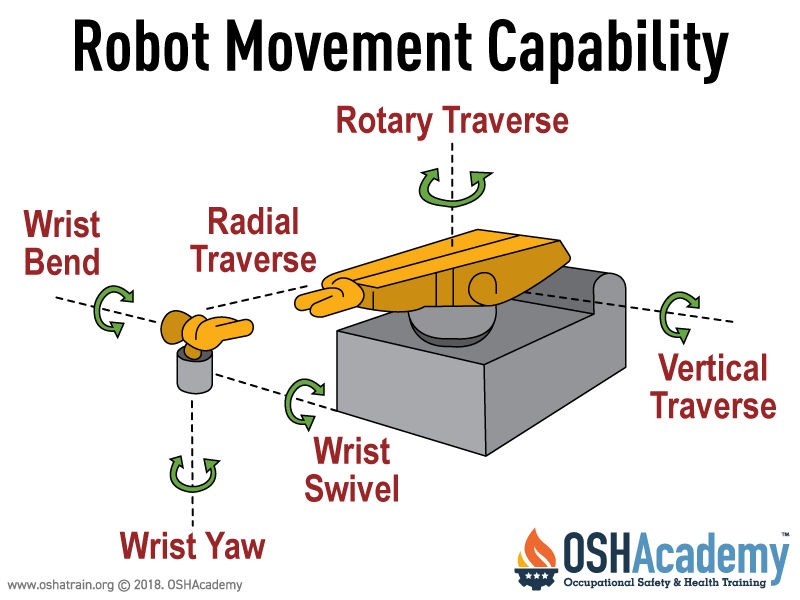
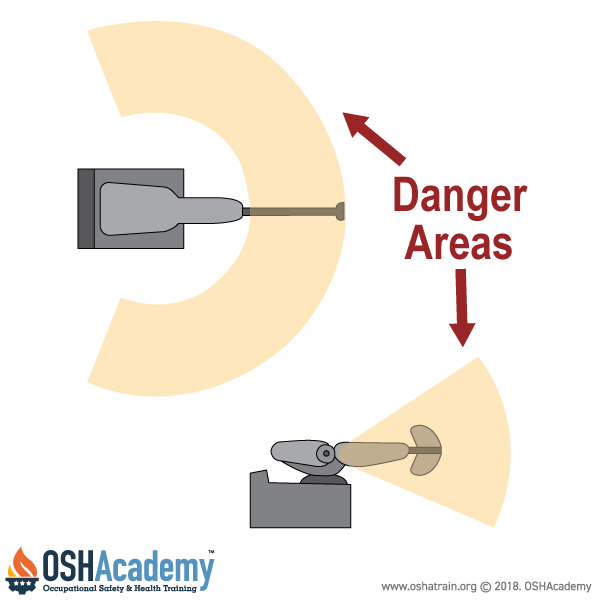
The three figures on this page show a type of robot in operation, the danger areas it can create, and an example of the kind of task (feeding a press) it can perform.
Guarding Robot Systems
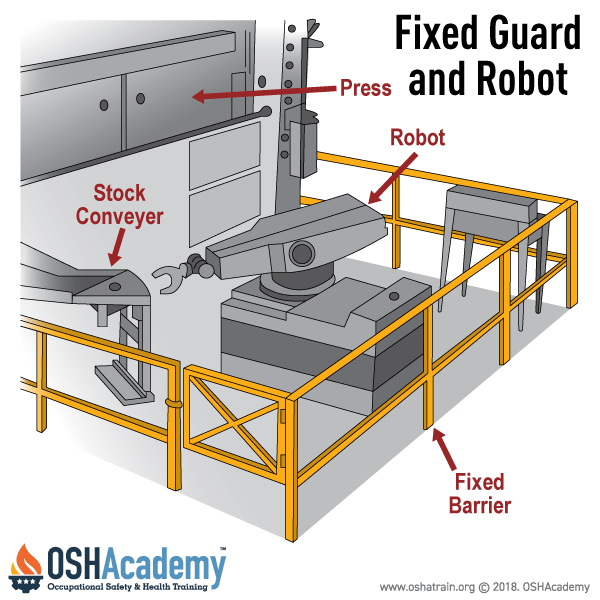
Robot Systems
Potential Danger Areas
Knowledge Check Choose the best answer for the question.
2-8. Why do most human error accidents occur when working around robots?
You forgot to answer the question!